引言
前一篇介绍了进程和线程调度,知道线程和进程在系统中是并发执行,这将会引发出一些问题。接下来从一个简单的生产者和消费者例子说起,从前有两个进程,一个进程负责往一个buffer里写数据,我们把它叫做生产者;一个进程负责消费数据也就是取走buffer里的数据,我们把它叫做消费者。因为我们要记录写到哪里,所以需要一个变量in来记录,还需要一个变量记录消费到哪里了out,现在我们假设核心的生产者代码段。
1 | while (true) { |
消费者核心代码
1 | while (true) { |
如果并发执行这个代码,肯定会有问题?因为cpu在修改count时,要先将count读入寄存器,然后在写入内存。假设count此时为4,生产者和消费者分别并发写入和消费,count的结果可能会为3、4、5,如果生产者和消费者分别将4读入寄存器,那么count的值将取决于谁后写回内存覆盖之前的值,所以值可能为3、5,这个结果显然是有问题的。将接下来将学习解决之道。
竞态条件&临界区
在学习进程&线程同步之前得先理解竞态条件和临界区的概念。
竞态条件
多个进程或线程并发访问或操作同一数据,其运行结果依赖于其访问发生的特定顺序
临界区
定义:对共享内存访问的程序片段被称为临界区,就像引言例子中外层while循环中的代码片段
临界区互斥性示意图
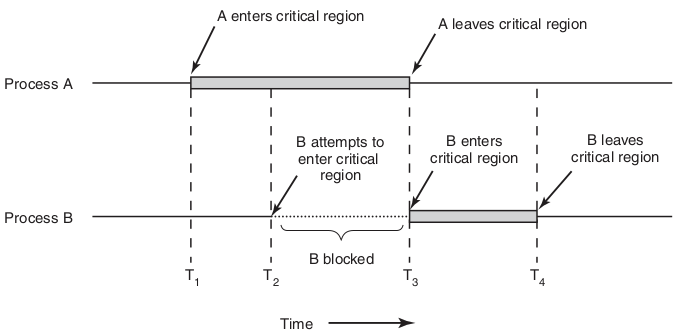
解决竞态条件方法满足的条件
- 互斥性,任何两个进程不能同时处于临界区
- 不应对CPU的速度和数量做任何假设
- 临界区外的进程不能阻塞其他进程
- 不得使进程无限期的等待进入临界区
简单解决办法
屏蔽中断
- 实现:在进入临界区后立即屏蔽中断,在快要离开时开启中断。
- 缺点
- 把屏蔽中断的权利交给用户进程是不明智的
- 如果是多CPU,只会屏蔽当前CPU有效
Peterson解法
实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
int turn; /* whose turn is it? */
int interested[N]; /* 哪个进程对条件感兴趣,初始化为0 */
void enter region(int process); /* 因为只有两个进程,所以process为0或者1 */
{
int other; /* 另一个进程编号 */
other = 1 −process; /* 另一个进程编号 */
interested[process] = TRUE; /* 表示当前进程对该条件感兴趣 */
turn =process; /* 设值,注意这里哪个进程后设置,该值为它的进程编号 */
while (turn == process && interested[other] == TRUE) /* 空语句 */ ;
}
void leave region(int process) /* 进程离开临界区 */
{
interested[process] = FALSE; /* 将进程对条件感兴趣的标志设置为false */
}while判断分析:如果turn的值为当前进程号,并且interested[other]为true,说明此时两个进程都对该条件感兴趣,并且另一个进程先来,所以turn的值才会为当前进程的值,它覆盖了另一个进程写入的值,所以另一个进程已经进入临界区,所以当前进程需要等待另一个进程离开临界区。
缺点:为了提高性能,现代处理器或者编译器有指令重排序,可能是导致该算法无法保证有效。虽然Peterson的解法在指令重排序下有问题,但是它却提供了同步解决的基础。
同步工具的硬件支持
在介绍同步工具之前,先讲一下硬件支持,比如内存屏障、CAS。
内存屏障
- 内存模型
- Strongly ordered:一个处理器对内存的修改立刻对其他处理器可见
- Weakly ordered:一个处理器的内存的修改不能保证立刻对其他处理器可见
- 原理:硬件提供的指令,通过强制将对内存的修改传播到其他处理器,从而确保其他处理器对内存的修改可见,在之后讲内存管理的时候细说
TSL指令
原理:设置存储器某个地址,测试并上锁。
1
TSL RX,LOCK
内存字LOCK读入寄存器RX,读字和写字硬件保证原子的
执行TSL指令锁住内存总线,禁止其他CPU在该指令结束前访问内存
1
2
3
4
5
6
7
8
9enter region:
TSL REGISTER,LOCK | 复制锁到寄存器并将锁设置为1
CMP REGISTER,#0 | 锁是0吗
JNE enter region | 如果锁不是0,说明锁已经被抢了,循环
RET | 返回,进入临界区
leave region:
MOVE LOCK,#0 | 在锁存入0
RET | 返回调用者
XCHG指令
原理:原子交换两个操作数,是TSL的一种替代指令
1
2
3
4
5
6
7
8
9
10enter region:
MOVE REGISTER,#1 | 将1放入寄存器
XCHG REGISTER,LOCK | 交换寄存器和锁的内容
CMP REGISTER,#0 | 锁是0吗
JNE enter region | 如果锁不是0,说明锁已经被抢了,循环
RET | 返回调用者,进入临界区
leave region:
MOVE LOCK,#0 | 在锁存入0
RET | 返回调用者
原子操作CAS(比较并交换)
- 原理:原理接受三个参数(old,ptr,new),底层是依赖CPMXCHG,注意CPMXCHG本身并不是atomic的,它的实现是在单处理器系统上通过禁止中断来达到原子性,如果是多处理器,则需要在CPMXCHG加前缀LOCK。ptr是该值存储地址,指令会将old加载到寄存器EAX,将ptr的值加载到EBX,将new加载到ECX,如果EAX等于EBX,将ECX存入EBX并且标志寄存器FZ位置为1;否则EBX存入EAX,将FZ位清0
同步工具
原子变量(Atomic)
- 原理:利用CAS实现的
信号量(Semaphore)
原理:提供了一对操作wait(Dijkstra的P)、signal(Dijkstra的V)原子操作。内部提供一个计数器和一个等待队列,这个队列可以是FIFO或者优先级队列。wait操作申请锁,初始定义资源数(当资源只有一个时,其实作用是一个互斥量),wait申请资源时,假设资源数还有剩余,那么扣减资源数,进程进入临界区,执行完临界区代码后,递增资源数,并且唤醒一个进程;如果没有资源可用,那么进程加入信号量的等待队列。当然具体细节各个操作系统实现可能不一样
如何保证wait、signal的原子性
- 单核处理器:禁用中断,禁止抢占
- 多核处理器:可以在信号量中定义一个互斥量,通过CAS和自旋来互斥进入wait和signal的临界区
linux实现,linux实现没有叫wait和signal,它们叫down和up分别对应wait、signal,只是名字不同它们的语义是一样的
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29struct semaphore {//数据结构
spinlock_t lock;
unsigned int count;
struct list_head wait_list;
};
//Dijkstra的P
void down(struct semaphore *sem)
{
unsigned long flags;
raw_spin_lock_irqsave(&sem->lock, flags); // 这里面禁止了抢占
if (likely(sem->count > 0))
sem->count--;
else
__down(sem); // 这里睡眠,重新调度
raw_spin_unlock_irqrestore(&sem->lock, flags);
}
//Dijkstra的V
void up(struct semaphore *sem)
{
unsigned long flags;
spin_lock_irqsave(&sem->lock, flags);
if (likely(list_empty(&sem->wait_list)))
sem->count++;
else
__up(sem);
spin_unlock_irqrestore(&sem->lock, flags);
}
互斥量(mutex)
- 原理:定义一个变量作为锁,利用处理器提供CAS原子修改变量的值来加锁和释放锁,如果锁不可用,进程自旋等待
- futex(快速用户区互斥量)
- 原理:实现了基本的锁,但是避免了陷入内核,除非不得不为之。包含两部分:一个内核服务和一个用户库,内核服务提供一个等待队列,没有竞争时,futex完全在用户空间工作。用户态定义一个共享原子变量来标识当前锁是否被其他进程持有,初始值为1表示锁可用,当进程申请锁时,先原子递减该值,如果结果为0,说明没有其他进程持有锁,进程可以进入临界区,否则,进程不会自旋,而是调用系统调用加入内核的等待队列
管程(Mointor)
信号量存在的问题:信号量能正确运行的前提条件是wait、signal严格的执行顺序,如果这啷个操作执行顺序有问题,那么可能会导致2个进程同时进入临界区
假设wait、signal顺序反了,可能会有多个进程进入临界区
1
2
3
4
5signal(mutex);
...
critical section
...
wait(mutex);假设signal被错误写成wait,这种情况,进程会永久阻塞
1
2
3
4
5wait(mutex);
...
critical section
...
wait(mutex);
Monitor出现的背景只是为了方便开发人员使用,减少直接使用信号量、互斥量容易带来的各种问题(信号量和互斥量本身没有任何问题,是使用过程中开发人员不正确使用带来的),因此对信号量、互斥量做了一层封装
Monitor语义结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19monitor monitor name
{
/* shared variable declarations */
function P1 ( . . . ) {
. . .
}
function P2 ( . . . ) {
. . .
}
.
.
.
function Pn ( . . . ) {
. . .
}
initialization code ( . . . ) {
. . .
}
}Monitor的结构
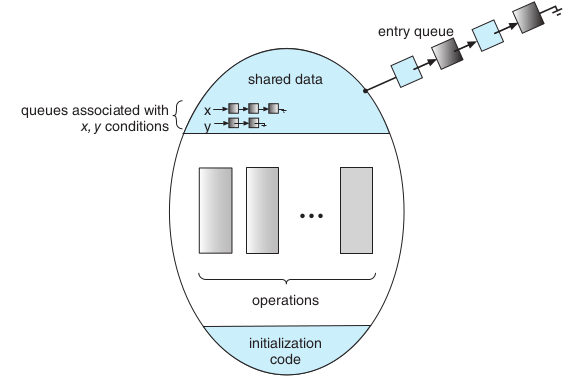
Monitor特性
- 同一时刻,只能有一个活跃进程。
- 只是一种编程语言概念,具体实现依靠特定语言,其内部可能是用互斥量实现
- 依靠编译器识别管程,进入管程的互斥依靠编译器
Monitor中有条件变量时,等待在条件变量的线程Q被线程P唤醒时,P的行为
- 唤醒并等待:P将等待Q离开Monitor或者等待在其他条件上
- 唤醒并继续:Q将等待P离开Monitor或者等待在其他条件上,这种看起来更合理,但是当P离开Monitor时,可能Q等待的条件已经变得不满足
用信号量实现Monitor
首先需要一个互斥量来控制能否进入Monitor,然后需要一个信号量来控制当线程唤醒等待条件变量的线程时,需要自己挂起,Monitor中的F函数被封装。mutex是进入Monitor的互斥量,next是线程唤醒等待条件变量时,因为采用的是唤醒并等待,所以需要等待被唤醒线程执行,而自己却要挂起,next_count是挂起的线程数
1
2
3
4
5
6
7
8wait(mutex);
...
body of F
...
if (next count > 0)
signal(next);
else
signal(mutex);Monitor中条件变量实现,x_sem是信号量,x_count是等待的线程数
wait方法实现
1
2
3
4
5
6
7x count++;
if (next count > 0)
signal(next);
else
signal(mutex);
wait(x sem);
x count--;signal方法实现
1
2
3
4
5
6if (x count > 0) {
next count++;
signal(x sem);
wait(next);
next count--;
}
屏障(Barrier)
原理:屏障像一道大门,当所有人都到了的时候,门就开了。进程运行到一个点时,会阻塞等待所有的进程都到达这个点,当所有进程都达到这个点时,所有的进程都将被唤醒,如下图所示
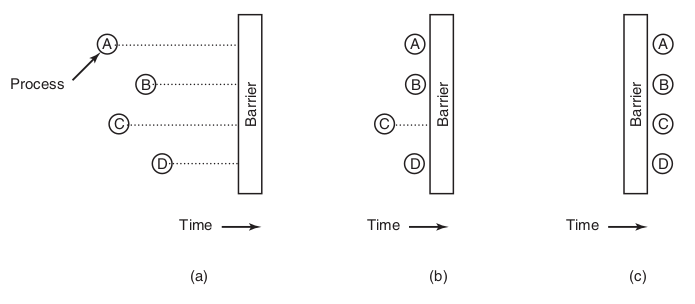
解决的问题:主要是解决一些程序,程序是分阶段运行,要求所有的进程到处于ready状态时才能进行下一阶段。打个比方,LOL这种竞技游戏,要等待大家都加载好了才能进游戏。
写时复制(Read-Copy-Update)
原理:最快的锁就是不用锁,为了找到一种办法对共享数据读和写可以并发执行,通常情况下是不可能的。但是在某些情况下,一些数据结构可以提供一种对读操作的保证,就是读操作要么读取旧数据,要么读取最新数据,但是不会读取新旧数组的组合。当新增和删除节点时,会先初始化需要操作的节点,这时候是不影响读的,读的还是旧的数据,当更改已经初始化完毕时通过CAS原子操作,修改为新的,这样就可以避免在写数据时加锁影响读
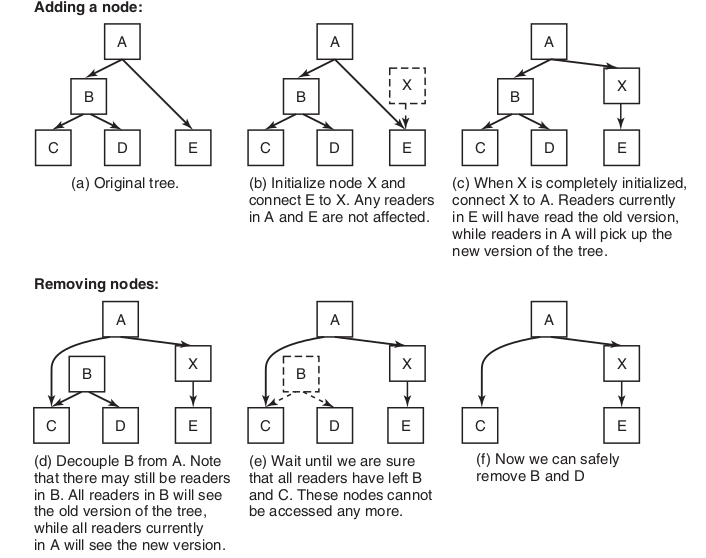
存在问题:比如上图的d中,删除了B,D节点,但是不知道是否有读在使用B、D节点,因此无法确定何时释放B、D节点。RCU设置了一个读持有引用的最大时间
总结
笔记很多地方没有详细的说明,如果要了解详细的细节东西,推荐看看《MODERN OPERATING SYSTEMS》和《Operating System Concepts》。