引言
上一篇文章讲了同步网络中的leader选举算法。考虑一个问题,当网络中有消息需要广播时,如果在网络中以最快的速度完成广播?或者如何计算图的直径?接下来就会一步一步解决这些问题
将在这篇文章中讲述分布式同步网络中广度优先搜索、最短路径和最小生成数算法。
广度优先搜索
利用广度优先搜索来构造方便用于广播通信的树,BFS树最小化最大通信时间
SynchBFS算法
前提假设
- 假设进程有uid
- 不知道网络大小和直径
- 给定初始root $i_0$
进程维护状态
- $parent$:记录进程的父节点是谁
- $marked$:记录是否被标记
算法流程
- 选择一个节点作为初始节点,定为$i_0$,设置为已标记,$i_0$发送一条search消息到节点$i$的$out-nbrs$
- 对于任意一个节点,如果节点还未被标记,并且收到search消息,则它将自己标记,并且将发送search消息的节点设置为它的parent,然后发送search消息到它的$out-nbrs$
算法图解
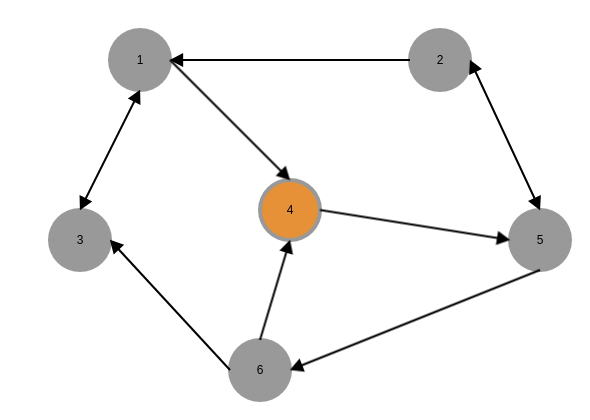
初始化选择4(可以随意选择)为root节点$i_0$
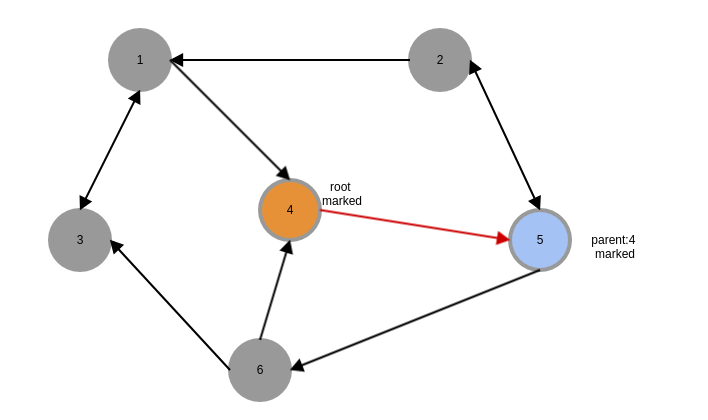
第一轮search消息,4只有一个$out-nbrs$,所以只有一条消息,5被标记,其parent节点为4,红色箭头代表search消息
第二轮search消息,5有两个$out-nbrs$
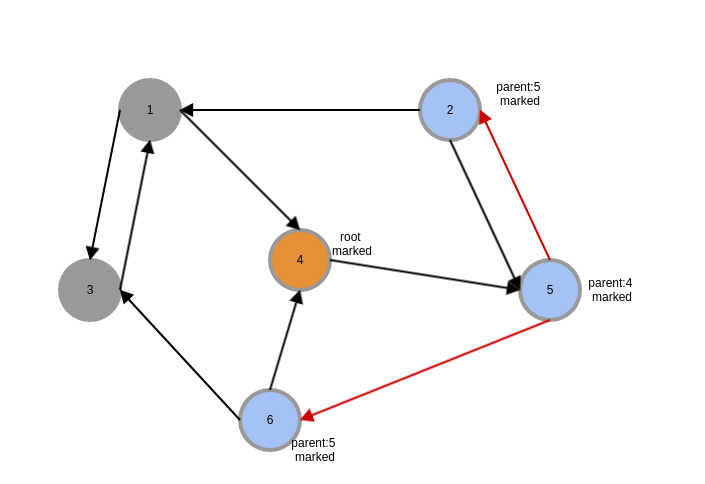
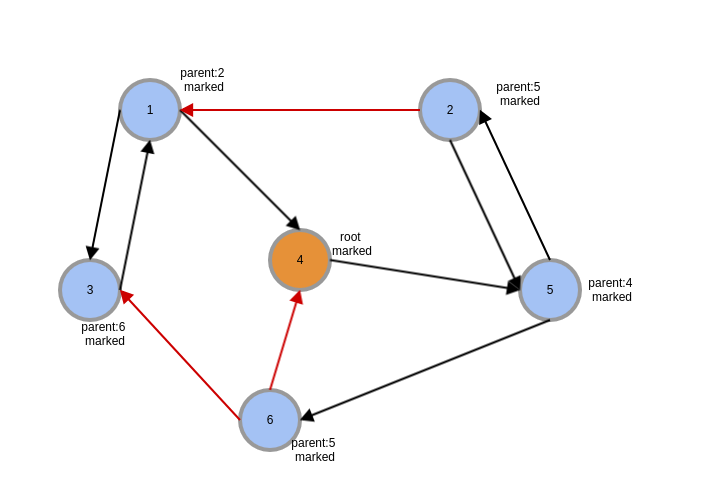
第三轮,因为是分布式系统,所以进程2和进程6是同时进行的
复杂度分析
- 时间复杂度:最多为daim轮,为图的直径,实际上可能更小,是$i_0$到它最远的节点
- 通信复杂度:通信复杂度:图的边数,$|E|$
如何确定child节点:双向网络中非常容易,child发送一条消息给parent。在单向网络中,需要间接节点将消息传递给它的parent节点,因此可以用SynchBFS算法实现这个过程,如果每一轮中一条链路只能发送一条消息,那这些消息可以合并成一条消息
- 复杂度分析
- 双向通信网络
- 时间复杂度:$O(diam)$
- 通信复杂度:$O(|E|)$,因为child可以直接发送消息给parent,因此总消息数为$2\cdot|E|$
- 单向通信网络
- 时间复杂度:$O(diam)$,因为额外的消息可以并行发送
- 通信复杂度:$O(diam\cdot|E|)$,因为需要发送额外消息,因此每一轮中每条边都可能会发送消息,总共有$diam$轮,所以总消息最多为$diam\cdot|E|$
- 双向通信网络
- 复杂度分析
SynchBFS算法终止
- 核心思想:当消息传递到叶子节点时,叶子节点标记自己后,发送消息让parent知道其已经完成,当parent收到所有其子节点的确认完成消息后,parent发送消息给它的parent,循环这个过程直到确认消息到达root节点$i_0$
- 复杂度分析
- 双向通信网络
- 时间复杂度:$O(diam)$,因为叶子节点返回确认完成消息是并行执行并且可以直接发送给parent,因此,时间最多为$2\cdot diam$
- 通信复杂度:$O(|E|)$
- 单向通信网络
- 时间复杂度:$O(diam^2)$,因为在发送确认消息时,每一级parent都是执行一次SynchBFS算法,每一层级的节点不能并行执行,因为不能确定,该级的parent是否收到了所有child的确认消息,因child是通过间接的节点传递消息,因此可能绕了一个diam的路径,最多有diam个层级,因此时间复杂度为$O(diam^2)$
- 通信复杂度:$O(diam^2\cdot|E|)$,和确认child节点类似,虽然每个层级的节点确认完成消息不能并行执行,但是不同节点的确认可以并行执行,因此每一轮最多有|E|消息,每一层级的确认消息最多需要$diam$轮,因此每一层级的确认需要消息最多为$diam\cdot|E|$,最多需要$diam$轮才能完成到$root$的确认,因此通信复杂度为$O(diam^2\cdot|E|)$
- 双向通信网络
算法应用
- 广播:一条消息的广播可以建立在BFS tree上,利用SynchBFS构造的一颗每一个非叶子节点都包含其子节点的BFS树,因此广播一条消息只需从root一直向前传播,时间复杂度为$O(diam)$,通信复杂度为$O(n)$
- 全局计算:比如网络中所有节点求和,利用BFS tree从叶子节点开始,发送一个值给parent节点,非叶子节点等到汇集了所有子节点的输入,sum后发送给它的parent节点,直到root节点。如果在双向网络中,时间复杂度为$O(diam)$,通信复杂度为$O(n)$
- leader选举:所有节点初始并行发送消息进行选举,利用最大uid构造树,在双向网络中,时间复杂度为$O(diam)$,通信复杂度为$O(diam\cdot|E|)$
- 计算图的直径(FloodMax需要用到):所有节点并行发送消息执行SynchBFS算法,每个进程利用$max-dist_i$来构建树,得每个节点得到一个最大值,然后在第二轮中,整个网络利用SynchBFS求出最大值。如果是双向网络,时间复杂度$O(n)$,通信复杂度$O(diam\cdot|E|)$
最短路径
SynchBFS解决了未带权边的搜索,但是实际环境中,有很多场景并不是这样简单的,通常节点间通信都是有开销的,这个开销我们可以抽象为权重,比如通信的延迟,或者通信的带宽等,接下来将介绍带权网络的算法
BellmanFord算法
前提假设
- 有向网络
- 有向边关联了一个权重
- 每个节点知道连接边的权重
- 每个节点知道网络的大小
进程维护状态
- $dist$:从$i_0$到该节点的最短距离,$i_0$初始化为0, 其他初始化为$\infin$
- $parent$:最短路径的父节点,初始化为$undefine$
- $round$:轮数,当$round$为n-1时结束
算法描述
消息生成算法
1
2if round <= n-1 then
send (dist, uid) to out-nbrs进程状态转换算法,每一轮收到消息M的$(dist,uid)$,收到M集合U
1
2
3
4
5
6if round <= n-1 then
min := min(U.dist)
if min+weight < dist then
dist := min.dist+weight
parent := min.uid
round := round+1;
算法图解
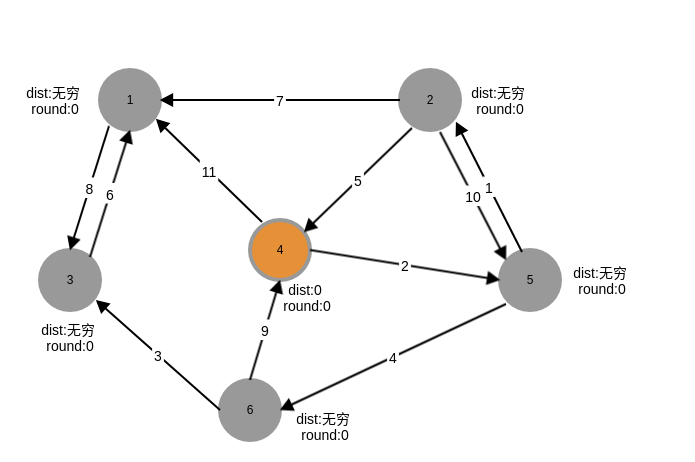
初始状态
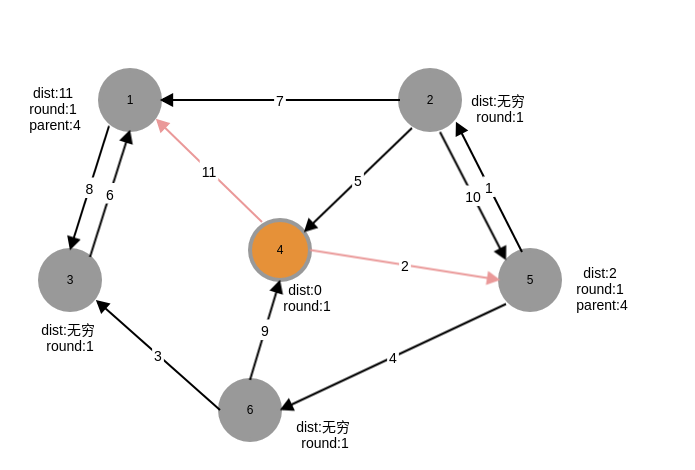
第一轮,红色的线表示最短路径
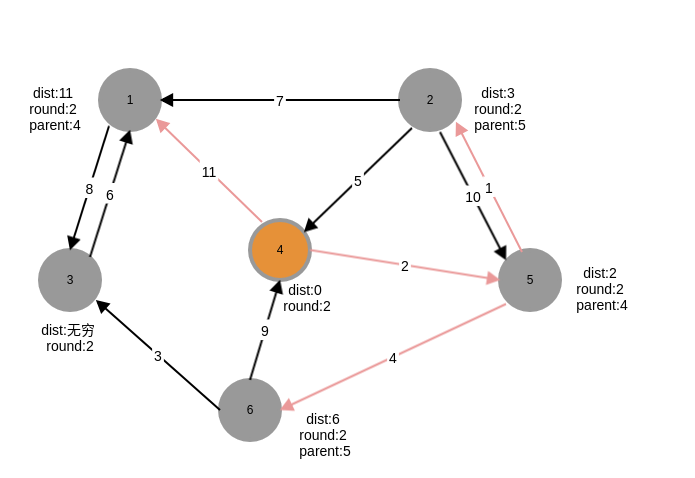
第二轮
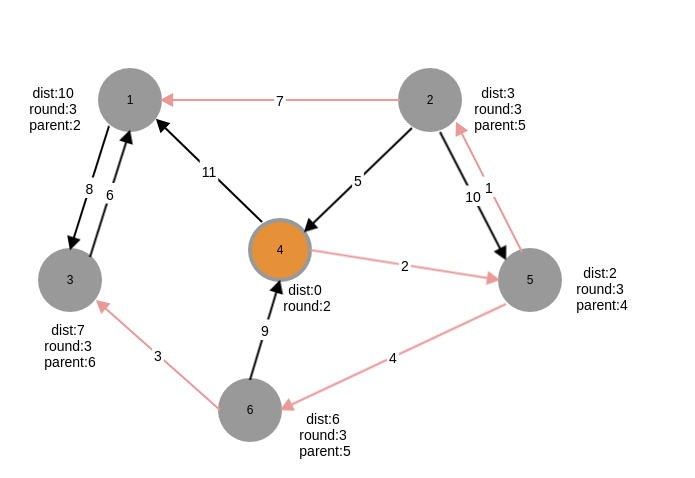
第三轮,可以看到节点1,最短路径已经有更小的值,其父节点也换成了2,直到$n-1$也就是round=5时,算法结束
复杂度分析
- 时间复杂度为$n-1$
- 通信复杂度$(n-1)\cdot|E|$
最小生成树
SynchGHS算法
前提假设
- 带权无向图
- 节点有$uid$
- 图大小已知
进程维护状态
- leader:记录component(一个子树结构)的leader的$uid$,
- k:level,每个level至少有$2^k$个节点
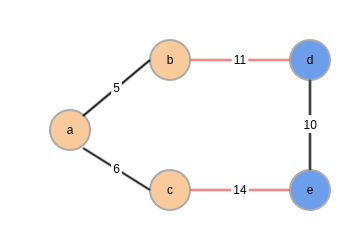
MWOE(最小权重出边):指连接两个component的最小权重的边,一个简单的图说明,橙色和蓝色分别是两个不同的component,两条红色的边都是两个component的连接边,权重11的边就是要找的MWOE
算法原理
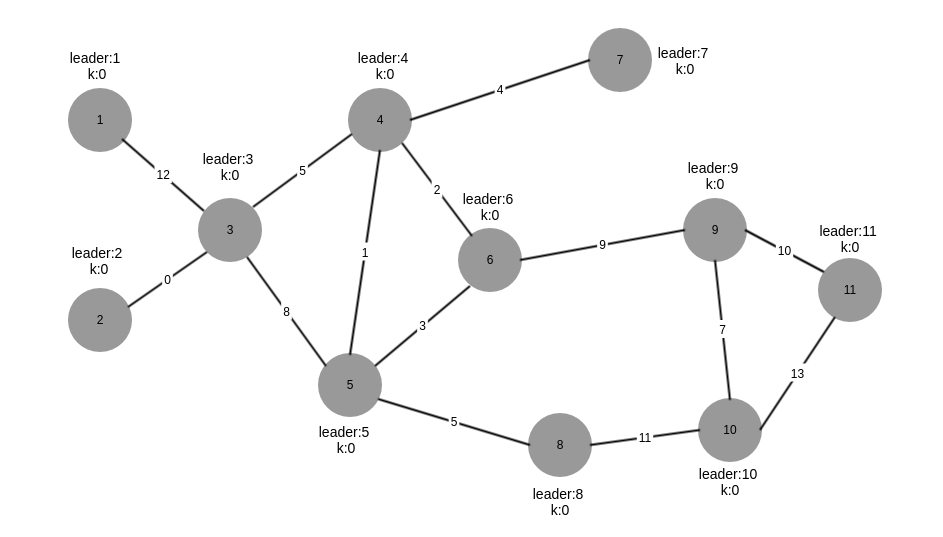
初始时,所有单个节点是一个component,每个节点的leader即是自己,每个component找出最小权重的出边MWOE,当一个component有多个节点时,会采用广播让各个节点找到MWOE,然后发送测试消息,看另一端的节点是否属于同一component,然后汇集MWOE到leader,leader得到整个component的MWOE。比如1只有一个边12,而3和2正好有同一条最小边0,所有这些操作都是并行执行的。
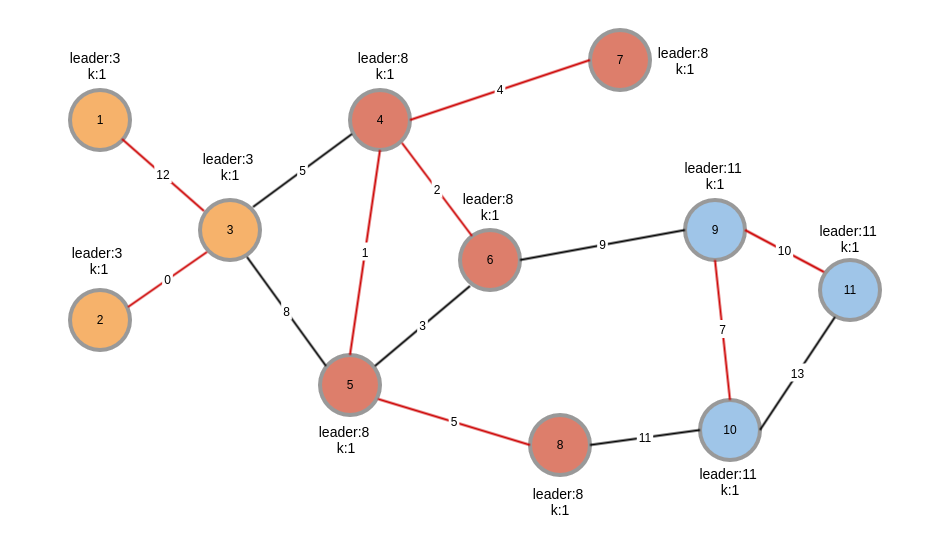
合并,leader通知component的MWOE的节点进行连接操作,节点将边加入树并通知端点节点进行同样的操作,然后节点uid大的端点节点利用树广播leader信息,宣布自己是leader,当有多个component合并成一个时,因为多个节点会广播leader信息,因此最终,整个component都会得到最大uid的leader信息,新component拥有了新的标识.(这里我的理解是可以直接使用当前component的Leader,但是书中描述的是用MWOE的端点uid大的作为新的leader)
算法终止,当所有的节点都联成一个图后,leader通知各节点寻找MWOE时,将没有MWOE了,因此leader通知各节点算法结束
复杂度分析
- 时间复杂度:因为每一级合并至少有两个component合并,因此最多需要$\log(n)$级可以完成MST构建,每一级需要的时间为$O(n)$,因此时间复杂度为$O(n\cdot\log(n))$
- 通信复杂度:每一级,leader需要发送消息通知树的各个节点寻找MWOE,图中共有n个节点,找到之后还要汇集结果,因此消息数为$2\cdot n$,因此通信复杂度为$O(n)$,各个节点探测MWOE时,可能每条边都要探测,因此还需要额外的$|E|$通信消息,因此整体的通信复杂度为$O((n + |E|)\log(n))$
优化:在测试边时,如果是一条内部边也就是端点都是同一component,那么就标记为”rejected”,当探测时,如果一条边是rejected,那就不需要发送探测消息,因此探测通信总共只需要执行$|E|$次,因此通信复杂度为$O(n\log(n) + |E|)$
最大独立集(MIS)
- 定义:假设有无向图$G=(V,E)$,其中$I \subseteq V$是图的独立集,当且仅当$i,j \in I (i,j) \notin E$,通俗的讲就是最大独立集中的任意两个节点之间没有边相连,因此MIS不是唯一的。$I$是最大独立集当任意$I^
$包含$I$且$I^$不是独立集 - 前提假设
- 知道图的大小$n$
- 不假设节点有$uid$
- 算法核心思想:每次选择独立集$I^
$,然后将$I^$执行操作$I := I\bigcup I^$,然后从图$G$中删除$I^$的邻居,直到$G$为空,因此问题的关键是求$I^`$
LubyMIS算法
利用随机化算法求$I^{\prime}$
算法思想:每个节点$i$随机选择一个随机数$val_i$(范围$1 \le val_i \le 4^n$),然后相邻节点之间发送消息$val_i$的最大为$winner$,$winner$会通知它的相邻节点为$loser$。$loser$会被从图$G$中移除
进程维护状态
- $round$:取值{1,2,3},初始值1
- $val$:取值$\{1 \le val \le 4^n\}$,初始任意值
- $awake$:boolean值,初始值true
- $rem-nbrs$:剩余没有选择的邻接节点,初始化为图的所有邻接节点
- $status$:$\{unknown, winner, loser\}$,初始值$unknown$
算法描述
随机数生成
1
if awake and round = 1 then val := random
消息生成算法
1
2
3
4
5
6
7
8
9
10
11if awake then
case
round = 1:
send val to all nodes in rem-nbrs
round = 2:
if status = winner then
send winner to all nodes in rem-nbrs
round = 3:
if status = loser then
send winner to all nodes in rem-nbrs
endcase状态转换算法
1
2
3
4
5
6
7
8
9
10
11if awake then
case
round = 1:
if val > v in all incoming values v then status := winner
round = 2:
if a winner message arrives then status := loser
round = 3:
if status in {winner,loser} then awake:=false
rem-nbrs := rem-nbrs - {j: a loser message from j}
endcase
round := (round+1) mod 3
算法图解
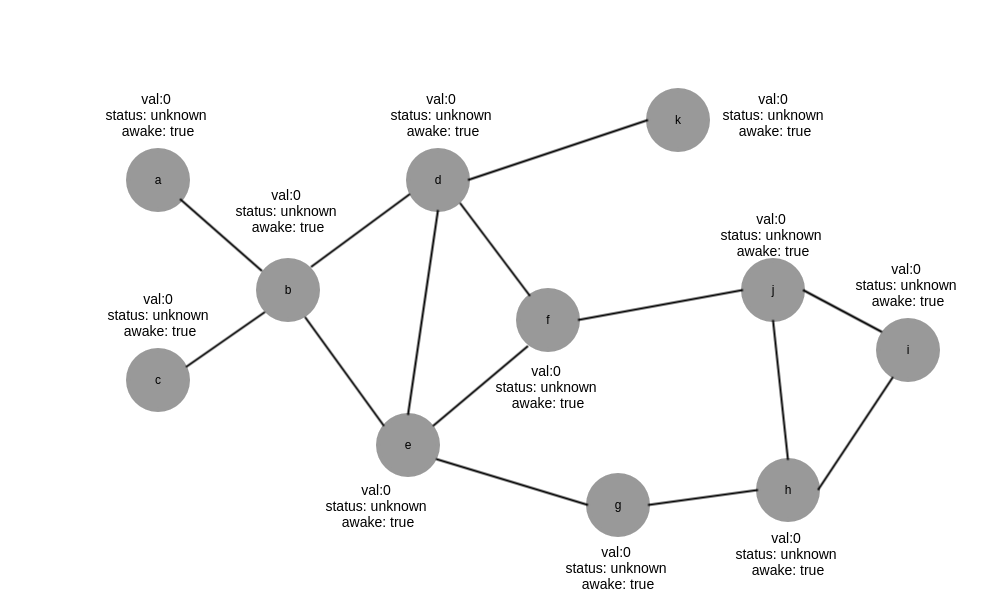
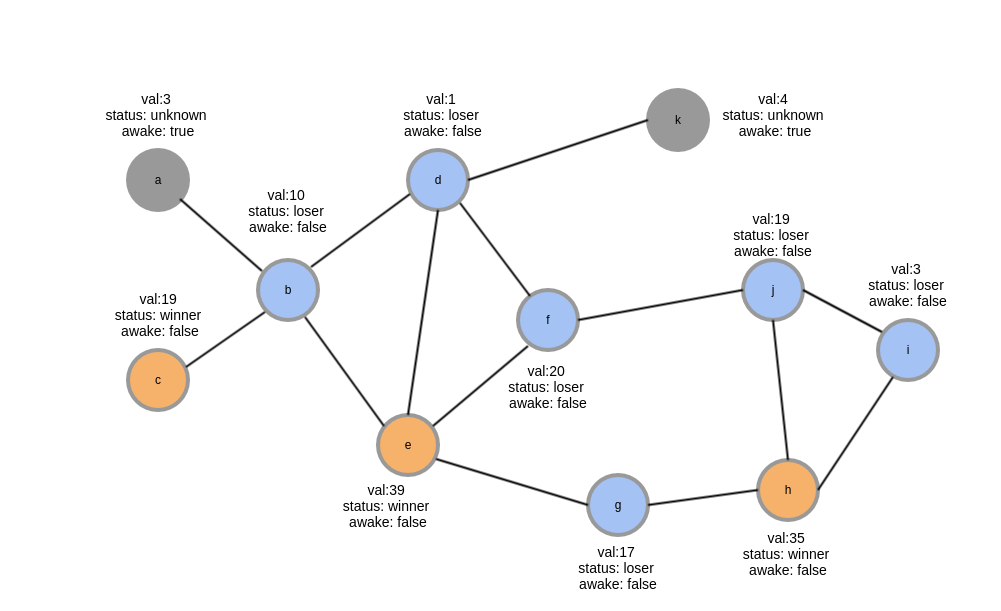
- 初始状态,注意LubyMIS算法并不需要$uid$,图中的字母编号仅仅是为了方便图的说明,不是$uid$,初始时所有节点$awake$都是true,状态都是$unknown$,$val$任意值,统一初始化为0
第一阶段结果示意图,每个阶段有三轮,这里只展示结果,橙色节点代表$winner$节点,蓝色节点代表$loser$节点,注意观察,不管蓝色节点还是橙色节点$awake$都是false,也就是它们已经结束不会再参与算法运行,可以看到已经只有a、k节点会进入下一阶段
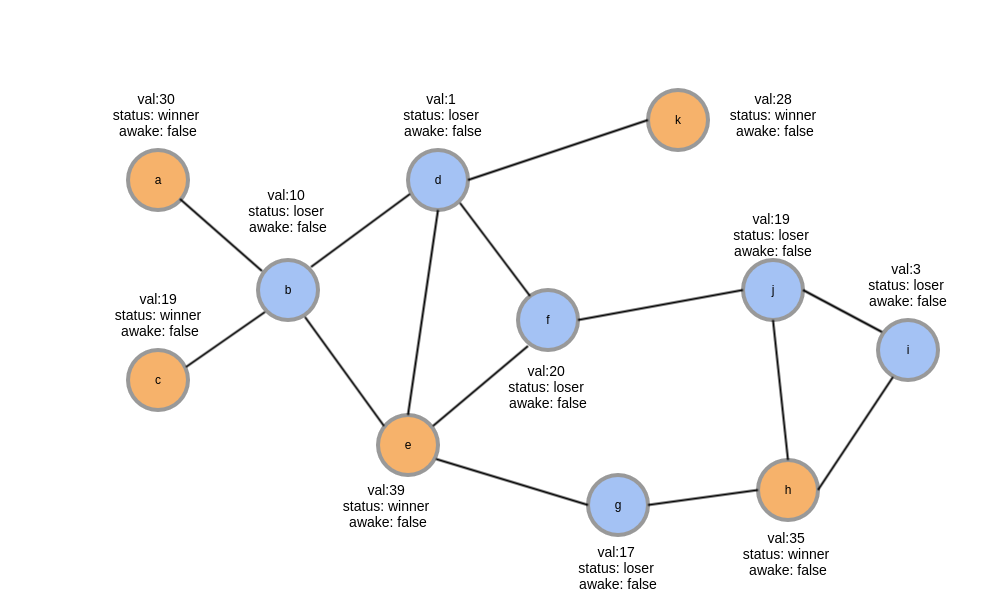
第二阶段结果示意图,经过第二轮,重新生成随机数,所有节点$awake$都是false,全部节点都已经运行结束,因此该图的最大独立集为$(a,c,e,h,k)$
随机化算法作用:主要作用是打破对称性,是一个非常常用的小技巧,比如在解决活锁,在raft协议选举失败时为了避免所有节点同时发起选举,失败后都会随机等待一段时间后发起选举
总结
本文主要讲了分布式同步网络中的BFS、最短路径、MST问题,接下来的文章将简单介绍分布式同步网络另一个关键性问题,一致性问题